Converting the rotary motion of a stepping motor into linear motion can be accomplished by several mechanical means, including rack and pinion, belts and pulleys and other mechanical linkages. All of these designs require various mechanical components. The most effective way to accomplish this conversion is within the linear actuator itself.
Description
The basic stepper motor creates rotary motion of a magnet rotor core through the uses of pulses and electromagnetic field passing around the core. Linear actuators convert this rotational motion into a linear motion, with the precise dependent of the step angle of the rotor and the method chosen to accomplish the conversion. The linear stepping motor, or linear actuator, first came into being in 1968 under patent number 3,402,308, issued to William Henschke. Since this time, the linear actuator has found its way into many critical applications. Some uses include manufacturing applications, precision alignment and precision fluid metering to name a few.
Linear actuators that use a screw would also have its precision be dependent of the thread pitch. Inside the rotor of a linear actuator, a nut is located in the center of the rotor. Also, a corresponding screw is engaged in the nut. In order for the screw to move axially, the screw must be constrained from rotating with the nut and rotor assembly by some means. With anti-rotation of the screw, linear motion is achieved as the rotor turns. Anti-rotation is typically accomplished either internally with captivation of a shaft screw assembly or externally with a nut on the screw shaft that is some way prevented from rotation, yet free along its axis.
For obvious design simplicity, it makes sense to accomplish the rotary to linear conversion right inside the motor. This approach greatly simplifies the design of many applications by allowing a “drop in motor” capable of precise linear motion without the need to install external mechanical linkages.
The first linear actuator used a ball nut and screw combination. The ball screw typically offers efficiency greater than 90%, while Acme threads typically offer efficiencies between 20% and 70% depending on thread conditions.Although ball screws are a highly efficient means to convert rotary motion to linear travel, the ball nut is sensitive to alignment, bulky, and expensive. Therefore, the ball nut is not a practical solution for most applications.

Most equipment designers are familiar with the hybrid stepper motor based linear actuator. This product has been around for several years, and just like any other device it has it’s strengths and limitations. A few of the benefits are inherent simplicity of design, compactness, brushless (therefore non-arcing), incredible mechanical advantage, design flexibility and reliability. However, in some instances these linear actuators may not be designed into certain devices because they are not durable without routine maintenance.
There are ways, however, to overcome such obstacles and provide linear actuators that are highly durable with long life and no maintenance. Due to the stepper motors’ brushless design, the only components subjected to wear are the rotor bearings and the thread engagement of the leadscrew/nut assembly. Years of advances in ball bearings have already provided the availability of types with extensive long life characteristics. Recently, there have been improvements in the life and durability of the leadscrew and mating nut components.
Increased Durability
To begin with, it is necessary to take a look at the basic design. A good model for a case study is the size 17 motor, which is at the smaller end of the hybrid stepper size range. Traditionally, a linear actuator is made by machining a hollow shaft from a bearing grade metallic material such as bronze. This hollow shaft has internal threads, which in turn engage the threads of a leadscrew. The hollow shaft is installed along the axis of the rotor. A popular choice for the leadscrew material is stainless steel, which also offers some corrosion resistance. For the most part, the type of threads used are machine threads (such as a #10-32) which may be of single or multiple starts depending on the resolution and speed desired in the actuator.
The machine thread, commonly known as a “V” thread is chosen because it is relatively easy to machine and roll form. Even though it is an appropriate choice for manufacturing, it is a poor choice for power transmission. A much better thread is the Acme thread. There are a few reasons for this.
The Acme thread is by design more efficient. Better efficiency is the result of lower losses, including friction, which in turn means less wear and ultimately longer life. By looking at the basic screw geometry it is easy to explain this. A “V” thread has an angle of 60 degrees between opposing faces, while the Acme is only 29 degrees.

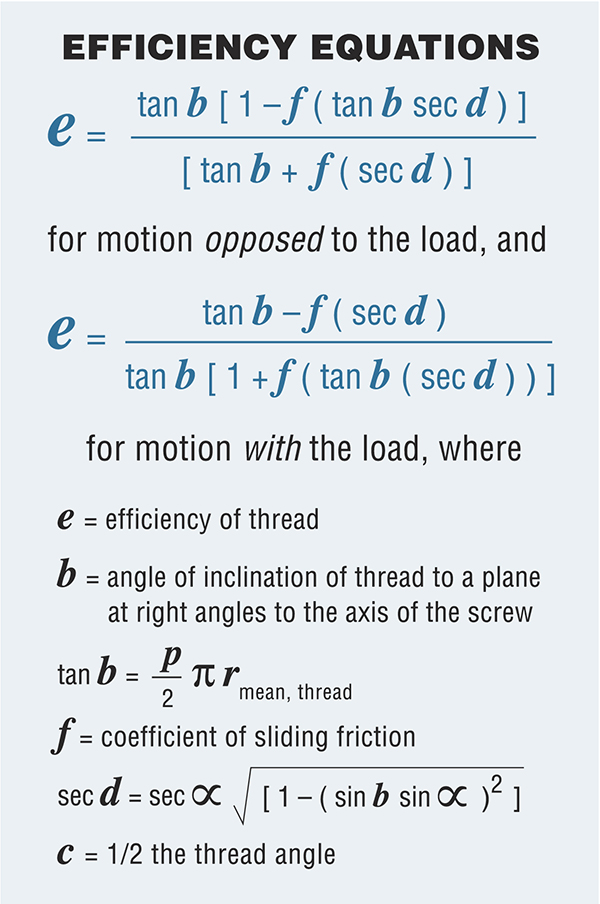
Assuming friction, torque and lead angle are the same; a “V” thread will only deliver approximately 85% of the force of an Acme. The efficiency is determined using the equation 1 or 2, for use with threads having a V shape, dependent of load direction. The ratio is simply calculated by dividing the efficiency of the 60° threads by the 29° threads.
The efficiency calculations do not take into consideration that the surface pressure will be much higher on the “V” thread, thereby further increasing losses. Acme thread leadscrews are generally manufactured for power transmission, so much closer attention is paid to surface finish, lead accuracy and tolerances. “V” threads are primarily used as fastener threads, so surface finish and straightness are not closely controlled.
Of equal, if not greater importance is the nut that drives the screw. This nut is often embedded in the motor rotor. The traditional nut material is a bearing grade bronze which lends itself to the required machining of the internal threads. It was a suitable compromise between physical stability and lubricity. Compromise, of course, is the key word since it excels at neither. A better material for a power nut in the linear actuator is a lubricated thermoplastic material. This is because with new engineered plastics, the screw threads may now travel with a lower coefficient of friction. The figure below contrasts the rotor thread materials’ frictional properties.

Based on this, it would seem obvious; why not use a plastic drive nut? Unfortunately, as good as the plastic is for the threads, it is not a stable enough material for the rotor journals of a hybrid motor. With the possible motor temperature rise of 135° F during motor operation, the plastic in this case could expand as much as .004”. Where brass, for instance, may only expand .001” under the same thermal conditions. See Figure below.

The bearing journals are critical in the hybrid motor design. The hybrid rotor design must maintain an airgap of only a few thousandths of an inch for optimal performance. The airgap is defined as the space between the outer diameter of the rotor magnet and the inner diameter of the stator. If the rotor assembly lost concentricity it would rub against the stator wall. Through material selection, a designer would desire having material benefits of both long thread life and bearing journal stability. By injection molding plastic threads within a metallic rotor assembly, this mutual benefit of properties is achieved. See Figure below.

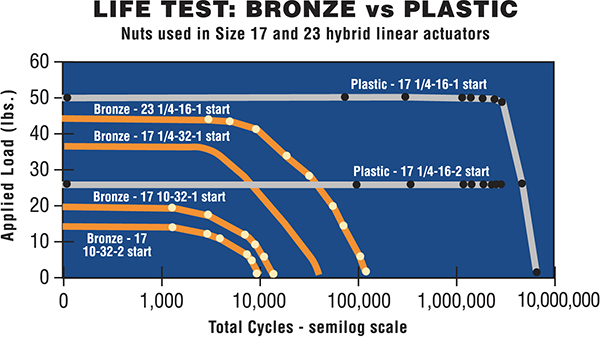
The result is an extremely improved product with quiet operation, higher efficiencies and life expectancies. The life expectancies can be orders of magnitude greater than a bronze nut under identical operating conditions. See Figure below.