Linear motion systems are found inside countless machines… precision laser cutting systems, laboratory automation equipment, semiconductor fabrication machines, CNC machines, factory automation, and many others too numerous to list. They range from the relatively simple, such as an inexpensive seat actuator in a passenger vehicle, to a complex multi-axis coordinate system, complete with control and drive electronics for closed loop positioning. No matter how simple or complex the linear motion system, at the most basic level they all have one thing in common… moving a load through a linear distance in a specific amount of time.
One of the most common questions when designing a linear motion system centers on motor technology. Once the technology is chosen, the motor needs to be sized to meet the demands of load acceleration, overcoming friction in the system, and overcoming the effect of gravity, all while maintaining a safe maximum operating temperature. The torque, speed, and power output of the motor is not just a function of load, but how that load is coupled to the motor through the mechanical transmission system.
 |
| Figure 1: Brush, Brushless, and Stepper Motors – many shapes and sizes |
 What motor should I start with… DC Stepper, Brush Servo, or Brushless Servo?
What motor should I start with… DC Stepper, Brush Servo, or Brushless Servo?
There is no such thing as the “best motor” for every application, but rather the best motor for a particular application. In the vast majority of incremental motion applications, the choice will either be a stepper motor, brush DC motor, or brushless DC motor. The most complex linear motion systems may use linear motors coupled directly to the load avoiding the need for mechanical power conversion (i.e. translation through a lead screw / ball screw, gearbox, pulley). Although maximum accuracy, repeatability, and positioning resolution can be achieved with direct-drive systems, they are the highest cost and complexity when compared with rotary motors. An architecture using rotary motors is much less expensive and will meet the majority of linear motion applications; however, some means of “rotary-to-linear” conversion (and as a result, power conversion) is needed to drive the load.
Stepper, brush, and brushless servo motors are all considered DC motors, however, subtleties exist that will cause an engineer to favor one type over the other two in a particular application. It must be stressed that this choice is highly dependent on the design parameters of the system. There isn’t a perfect motor for every application and all decisions will require design tradeoffs. At the most basic level, all motors, whether considered AC or DC, are identical in operation in the way they generate output torque (interaction of magnetic fields). DC stepper, brush servo, and brushless servo motor technologies, however, use a DC supply in order to power them. For linear motion applications, this doesn’t mean that a fixed source of DC can be applied directly to the motor windings; electronics are needed to control the winding current (related to output torque) and voltage (related to output speed).
Listed below is a summary of strengths and weaknesses of the 3 technologies…
| DC Stepper Motor |
|
| |
Strengths
|
| |
- Open loop positioning – No encoder required
- Simple “pulse and direction” signal needed for rotation
- High torque density at low speeds
- Motor can be in a “stall” position without exceeding the temperature rating
- Lowest cost solution
|
| |
Weaknesses |
| |
- No position correction in the event the load exceeds the output torque
- Low power density – torque drops off dramatically at higher speeds
- Motor draws continuous current, even at standstill
- High iron losses at above 3000 RPM
- Noticeable cogging at low speeds (can be improved with a micro-stepping drive)
- Ringing (resonance) at low speeds
|
| DC Brush Servo Motor |
|
| |
Strengths |
| |
- Linear speed / torque curve (compared with a stepper)
- Low cost drive electronics (4 power switching devices)
- Many different configurations available
- Very smooth operation possible at low speeds
- High power density – flatter torque at higher speeds (compared with a stepper)
|
| |
Weaknesses |
| |
- Motor will draw high current in an overload condition (same as the brushless motor)
- Encoder needed for closed-loop positioning (same as the brushless motor)
- Limited in speed due to mechanical commutation
- Brush wear
- High thermal resistance (copper is in the armature circuit)
|
| DC Brushless Servo Motor |
|
| |
Strengths |
| |
- High power density – flatter torque at higher speeds (compared with a stepper)
- Linear speed / torque curve (compared with a stepper)
- Electronic commutation – no mechanical brushes
- Low thermal resistance (copper is in the stator circuit)
- Highest speeds possible (compared with stepper or brush DC motors)
|
| |
Weaknesses |
| |
- Highest cost between the 3 motor technologies
- Motor will draw high current in an overload condition (same as the brush motor)
- Encoder needed for closed-loop positioning (same as the brush motor)
- Higher drive complexity and cost – (6 power switching devices)
- Rotor position sensors required for electronic commutation
|
Power Conversion in the Linear Motion System
No matter what type of motor and mechanical transmission chosen, the design of the linear system begins with the load mass and how fast the mass needs to traverse from point A to point B. Motor type, size, and mechanical design boils down to the power (watts) required to move the load. Starting with the load and ultimately working back to the power supply for the motor drive, the analysis is a series of steps to understand the power conversion from one part of the system to the other. Watts in the form of voltage and current into the drive will eventually translate to watts in the form of moving a given load in a specific amount of time.
 |
Figure 2: Power Conversion from Power Supply to Load
|
How is all this accomplished? The best way to illustrate this is through an example of choosing a motor for a simple linear rail mechanism that moves a load from point A to point B. The application requirements are as follows…
| Mass |
|
|
9Kg |
| Move Distance |
|
|
200mm |
| A-B Move Time |
|
|
1.0s |
| Dwell Time |
|
|
0.5s |
| Move Profile |
|
|
1/3-1/3-1/3 Trapezoid – controlled accel/decel |
| Rotary-to-Linear Conversion |
|
|
TFE coated lead screw – 8mm diameter, 275mm long |
| Load Support |
|
|
Linear ball rail and TFE coated guide rails (μ=0.01) |
| Mass Orientation |
|
|
Vertical |
| Overall Size |
|
|
System size limited to smallest volume possible |
| Drive Architecture |
|
|
Minimum complexity – Cost sensitive application |
| Drive Control |
|
|
4 quadrant operation w/ encoder feedback |
| Drive Power Supply |
|
|
32VDC, 3.5Arms, 5.0Apeak max output capability |
| Worst Case Ambient Temp |
|
|
30°C |
 |
Figure 3: Motion Profile
|
The best approach is to begin at the load and work back to the motor through the various power conversion elements. It’s personal preference regarding what units to work with, but SI units are recommended. Working in SI units avoids the need to remember multiple conversion constants and the end result can always be converted back
to English units. See Table 1 for the list of symbols and units used throughout the example.
How much power is needed to move the load in the required time?
Table 1: Symbols and Units
|
 |
A 9kg mass lifted against gravity will require a force of 88N. Calculating the watts needed to move the load will provide a starting point for determining the components in the rest of the system. This is the average power needed to move a mass of 9Kg vertically from point A to point B in 1 second. System losses such as friction are not included. The motor shaft power required will be somewhat higher and depends on the other components used in the system.
 |
P = (88N x 0.2m) / 1.0s = 17.64w
|
This is different than the peak power that will be required from the system. Once acceleration and deceleration are taken into account, instantaneous power during the move profile will be somewhat higher.
What motor technology should I consider?
A stepper motor would meet the application requirement of a simple drive architecture and a relatively low cost solution. Since overall system volume is very important in this application, however, a stepper motor would not be the recommended choice. At a minimum power requirement at the load of 17.64 watts (not including system losses or instantaneous peak power), a very large stepper motor would be required. A DC brushless motor would have worked well; however, due to the cost-sensitive nature of the application and the desire for a simple drive architecture, this would also be a less than ideal choice. A DC brush gearmotor with an in-line planetary gear head meets the requirements of small footprint, minimum drive complexity, and relatively low cost. Also, since a lead screw will be the means of rotary-to-linear conversion at the load, the output speed of a gearmotor can be kept at around 1000 RPM, helping to limit the heat generated at the lead screw and nut thread interface.
What is the velocity, reflected inertia, and reflected load at the gearmotor shaft (lead screw input)?
Step 1
Calculate the peak linear velocity of the application when a 1/3-1/3-1/3 motion profile is used… |
 |
| vpk = (3 x 0.2m) / (2 x 1.0s) = 0.6m / 2s = 0.3m/s |
| |
Step 2
Calculate the minimum screw lead needed to keep the lead screw speed at approximately 1000 RPM… |
 |
| Lmin = (0.3m/s x 60) / 1000 = 0.018m = 18mm |
| Referring to the Kerk® screw chart, the closest lead in an 8mm screw diameter is 20.32mm. |
| |
Step 3
Calculate the peak shaft speed of the lead screw (rad/s) for a linear velocity of 0.3m/s… |
| |
Peak lead screw speed = (vpk x 60) / L
Peak lead screw speed = (0.3m/s x 60) / 0.02032m = 886 RPM ≈ 900 RPM
ωpk = (900 x 2π) / 60
ωpk = 94.2 rad/s |
| |
| Lead screw specifications: |
Kerk® 8mm diameter, 20.32mm lead,
275mm length, TFE coated, BFW freewheeling nut
Efficiency = η s =86%
Inertia = Js = 38.8 x 10-7 kgm2 |
| |
Step 4
Determine the total reflected inertia (JT) back from the load to lead screw shaft… |
 |
JL = 9kg x (0.02032m / 2π)2
JL = 9.42 x 10-5 kgm2 |
 |
| |
Step 5
Determine the shaft torque needed to accelerate the load inertia (Ta)… |
 |
a = (0.3m/s – 0m/s) / (0.333s – 0s)
a = 0.901 m/s2 |
 |
α = (0.901m/s2 x 2π) / 0.02032m
α = 278.6 rad/s2
Ta = (JT x α) + [(cosΘmgμ x L) / (2π x ηs)] + [(sinΘmg x L) / (2π x ηs)]
Ta = (9.81 x 10-5 kgm2 x 278.6 rad/s2) + [(cos90°) (9Kg)(9.8m/s2)(0.01)(0.02032m) / (2π x 0.86)]
+ [(sin90°)(9kg)(9.8m/s2)(0.02032) / (2π)(0.86)] |
| |
Ta = (0.0273) + [0] + [0.3309] = 0.3582 Nm
Ta = 0.3582 Nm
Tg = 0 Nm
Tf = 0.3309 Nm
Td = (-Ta)
Td = -0.3582N |
What is the RMS torque (Trms) required at the gearmotor shaft (lead screw input)?
The RMS torque requirement is a key parameter to understanding the thermal rise of the motor or gearmotor chosen. If the RMS torque falls outside the “safe operating area” or continuous operating area of the DC motor curve, the motor will be thermally overloaded.
What are the 1st approximation power requirements to drive the lead screw shaft?
 |
Ppk = 0.3582 Nm x 94.2 rad/s
Ppk = 33.74 W |
 |
Pavg = [(9kg)(9.8m/s2)(0.2m) / 1.0s] / 0.86
Pavg = 20.47 W |
What are the final load parameters as seen by the lead screw input shaft (gearmotor output shaft)?
Trms = 0.2851 Nm
Tg = 0.3309 Nm
Ta = 0.3582 Nm
ωpk = 900 RPM = 94.2 rad/s
Ppk = 33.74 W
Pavg = 20.47 W
The gearmotor needs to deliver a peak acceleration torque to the lead screw shaft in order to accelerate the mass against gravity to the steady-state lead screw speed of 886 RPM (rounded up to 900 RPM). The gearmotor will then need to supply enough steady-state torque to move the mass against gravity at a constant velocity. During deceleration, the gearmotor will need to supply a negative torque to stop the load in a controlled manner. All this will occur in 1.0s before the motor stops and remains idle for a 0.5s dwell. After resting, the gearmotor will reverse and move along the same motion profile to bring the load back to the starting point.
What gearmotor (motor/gearbox combination) will be able to meet the above load parameters?
There are several different gearmotor solutions that will meet this requirement. Ultimate choice will be based on many other factors including total footprint, audible noise, price, etc., however, to address all these items would exceed the intended scope of this example. In all cases, however, the continuous torque capability of the gearmotor chosen must exceed the RMS torque requirement of the application or thermal overloading will result. For this example, the RMS torque is 0.2851 Nm required at the lead screw input shaft.
Step 1
Determine 1st approximation motor choice that will meet the overall power requirements.
Average power and peak power required at the lead screw shaft is 20.47 W and 33.74 W. This doesn’t mean that a 21 W rated power motor should be chosen to meet the load requirements. This motor will not be sufficient due to other losses throughout the system. Since the lead screw shaft power needs to come from the motor through a mechanical transmission (gearbox), the efficiency of the gearbox also needs consideration as well as any safety factor that the engineer wants to design into the system.
A good first approximation for this application is the PITTMAN 9237 motor. This is a relatively small diameter brush-type DC motor with a rated (continuous) output power of 37 W. The motor specifications are listed below…
| Winding Voltage (V) |
|
|
24 V |
| Continuous Torque (TC) |
|
|
0.0812 Nm |
| Speed @ Continuous Torque (nCT) |
|
|
4370 RPM |
| Current @ continuous Torque (IC) |
|
|
2.36 A |
| Continuous Output Power (PC) |
|
|
37 W |
| Torque Constant (KT) |
|
|
0.042 Nm/A |
| Voltage Constant (KE) |
|
|
0.042 V/rad/s |
| Terminal Resistance (Rm) |
|
|
1.85 Ω |
| NL current (Io) |
|
|
0.180 A |
| NL speed (no) |
|
|
5230 RPM |
| Peak current (Ipk) |
|
|
13 A |
| Peak torque (Tpk) |
|
|
0.5422 Nm |
| Thermal Resistance (Rth) |
|
|
11 °C/w |
| Max Winding Temperature |
|
|
155°C |
In the case of the motor above, the continuous output power is 37 W using a reference voltage of 24V. At first glance, this motor appears as though it can meet the load requirements of this application with some additional safety factor.
Even though the high-level application parameters indicated that a 32 VDC drive power supply is used, a 24 VDC motor winding was chosen in order to allow some additional voltage “headroom” from the drive (in this case, about 33%). This can be important to supply an additional voltage “boost” to ensure that the intermittent peak power requirements can be met. A lower voltage motor winding would also work; however, this would also require more current from the drive for a given load. A 24V motor winding would allow a voltage boost capability from the 32V drive while also minimizing the load current.
Step 2
Using the motor data above along with the load parameters at the lead screw shaft, choose an appropriate gearbox that would accomplish the job...
For this application, an in-line planetary gearmotor is desired. Referencing the website www.pittman-motors. com , a G30A planetary gearbox is compatible with the 24V 9237 PITTMAN motor. Using a few quick calculations, we think that a 5:1 gear reduction may meet the application requirements. Using a 5:1 gear reduction, the maximum output torque this gearbox can safely handle is 2.47 Nm which easily exceeds the 0.3582 Nm peak torque requirements of this application. A 5:1 G30A planetary gearbox with an efficiency of 0.90 will result in the following requirements at the motor output shaft (input to the gearbox)…
 |
| |
Ta @ gearbox output (lead screw input) = 0.3582 Nm
→Ta(motor)@ motor output (gearbox input) = 0.0796 Nm
|
| |
Trms @ gearbox output (lead screw input) = 0.2851 Nm
→Trms(motor)@ motor output (gearbox input) = 0.0634 Nm |
| |
ωpk@ gearbox output (lead screw input) = 900 RPM = 94.2 rad/s
→ωpk(motor)@ motor output (gearbox input) = 4500 RPM = 471 rad/s |
| |
| Ppk(motor)@ motor output (gearbox input) = 37.5 W @ motor shaft |
The 24VDC PITTMAN 9237 motor is rated for a continuous output torque of 0.0812 Nm and a continuous current rating of 2.36 A. The RMS torque requirement of the application is 0.0634 Nm. As a first approximation, this gearmotor (motor/gearbox) will safely meet the RMS torque requirements. Although the continuous rated power output of the 9237 motor is 37 W and the peak (intermittent) power required for the motion profile is 37.5 W, this motor can still be safely used because the RMS torque requirement of the application is still within safe operating limits.
Can the drive and power supply meet requirements of the load?
Step 1
Calculate the peak current required… |
 |
Ipk = (0.0796 Nm) / (0.042 Nm/A) + 0.180A
Ipk = 2.075 A |
 |
| |
Step 2
Calculate the RMS current required… |
| |
Irms = (0.0634 Nm) / (0.042 Nm/A) + 0.180A
Irms = 1.690 A |
 |
| |
Step 3
Calculate the minimum bus voltage required for Ppk |
| |
VBUS(min)= (2.075A x 1.85 Ω) + (471 rad/s x 0.042 V/rad/s)
VBUS = 3.839 + 19.782 V
VBUS = 23.621 V ≈ 24 V |
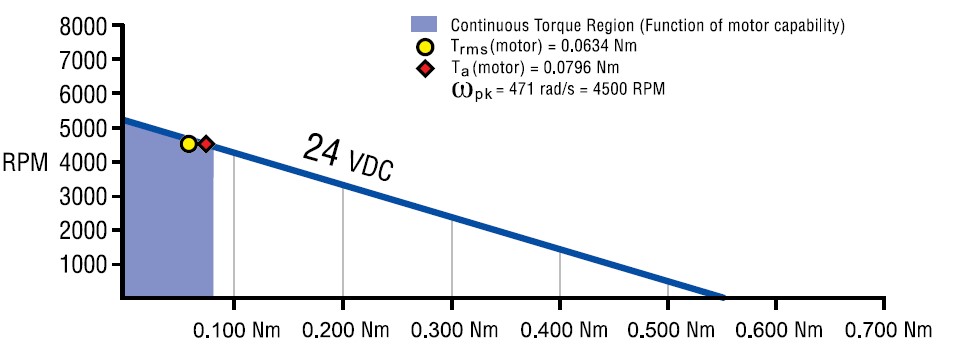
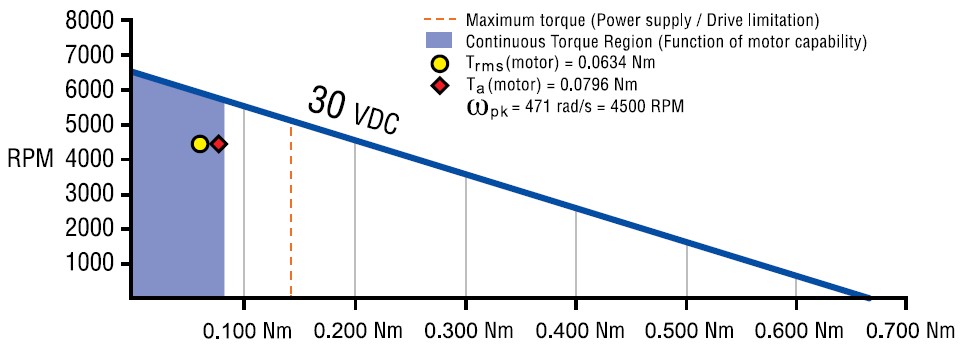
Based on the calculations above, the drive and power supply should meet the dynamic load requirements of the motion profile. Since the drive power supply input voltage is 32V, the maximum DC bus voltage will be approximately 30V, leaving plenty of margin above the minimum bus voltage requirement of 24V. The maximum current rating of the drive and power supply can also meet the RMS current and peak current required by the application. Figure 4 illustrates the published motor performance using a 24V reference voltage. In order to meet the peak motor velocity (input to the gearbox) of 4500 RPM while maintaining the torque requirements, input voltage to the motor can be increased slightly within limits of a particular motor design. Figure 5 illustrates the same motor using a maximum terminal voltage of 30V available from the drive.
When comparing the motor performance at 24V and 30V, it’s clear the location of the load points remains the same, as these points are determined by the application requirements. In the case of the 24V condition, however, the maximum velocity of 4500 RPM may or may not be met, as both the acceleration torque and the RMS torque points fall very close to the 24V load line. Based on the calculations above, a minimum bus voltage of 24V is needed to meet the peak requirements of the application. Although a 24V bus voltage may initially meet the requirements of the application, there is no safety factor and any mechanical wear occurring in the system over time could cause the speed to drop below the 4500 RPM requirement. The 30V bus voltage from the drive will provide plenty of safety margin to insure the peak velocity of 4500 RPM can be met.
Another item to notice is that the acceleration torque (Ta(motor)) and the RMS torque (Trms(motor)) both lie within the shaded region. It’s critical that the RMS torque remain below the continuous torque rating of 0.0812Nm but in many applications, the acceleration torque will move outside the boundaries of the continuous torque region. This is perfectly acceptable because the acceleration torque is a component of the RMS torque calculation. In this application, it’s a coincidence that acceleration torque and RMS torque happen to fall within the shaded area, but the point to remember is that it’s absolutely necessary for the RMS torque to fall within the shaded region of the curve, otherwise thermal overloading will occur.
|
| Figure 4: Motor Performance @ published 24V reference voltage |
| |
|
| Figure 5: Motor Performance @ 30V max voltage capability of the motor drive |
After going through this process, it’s clear that the prime mover, in this case a DC gearmotor, needs to be sized to meet dynamic load conditions encountered throughout the motion profile. This is a sharp contrast from the process of sizing a motor for continuous operation at an unchanging load point. Incremental positioning applications require frequent “starts-and-stops” and a duty cycle that requires the motor to work harder during controlled acceleration/deceleration. The main concern in sizing a motor is to ensure the motor remains within its safe operating temperature. The RMS torque and current calculations are the most important quantities required for estimating total temperature and temperature rise of the motor for a particular motion profile. To calculate temperature rise and motor temperature, the following equations can be used.
What is the (estimated) worst case temperature of the motor under the required load conditions at an ambient temperature of 30°C?
Ѳr = [(Rth x Irms 2 x Rm) / (1-(Rth x Irms 2 x Rm x 0.00392/°C))]
Ѳr = [(11 °C/w x 1.690A2 x 1.85 Ω) / (1-(11 °C/w x 1.690A2 x 1.85 Ω x 0.00392/°C))]
|
|
Ѳr = [(58.1) / (1-( 0.228)]
Ѳr = 75.26°C ≈ 76°C
|
|
Ѳm = Ѳr + Ѳa
Ѳm = 76°C + 30°C
Ѳm = 106°C |
With a 76°C rise based on the RMS load and a worst case ambient temperature specification of 30°C, resulting motor temperature should stabilize at approximately 106°C. The PITTMAN 9237 motor is Class F rated (155°C), allowing a safety margin of a 49°C. If any portion of the motion profile is altered such as total move distance, acceleration / deceleration rates, dwell time, etc. the equivalent motor load (both peak and RMS) will also change. The analysis will need to be repeated using the revised motion profile parameters in order to ensure the motor will remain within safe temperature limits.
Please keep in mind that all the equations used in this example are meant to be a 1st approximation analysis. The system should be tested using actual load conditions and the steady-state temperature determined using thermocouples in several locations on the motor. A current and voltage reading should also be taken at the input to the motor. The motor will operate differently under a steady-state elevated temperature. For instance, motor resistance, torque constant, and voltage constant will all change under actual operating conditions, resulting in a corresponding change to the peak current, RMS current, and bus voltage requirements as calculated using the equations above. Always test the system under real-life operating conditions and contact the motor manufacturer for advice.
Motor sizing is just the beginning…
This paper focused on properly sizing a motor for a relatively simple single axis linear motion application. Although the principles are identical for a more complex system such as an X-Y table or a multi-axis precision pick-and-place mechanism, each axis will need to be analyzed for load independently. Another consideration outside the scope of this article is how to choose an appropriate safety factor in order to meet the desired life of the system (number of cycles). System life isn’t just a function of the motor size, but also the other mechanical elements in the system such as the gearbox and lead screw assembly. Other factors such as positioning accuracy, resolution, repeatability, maximum roll, pitch, and yaw, etc. are all important considerations to insure the linear motion system meets or exceeds the application goals.
Click here to download PDF version.