Hybrid Stepper Actuators are electromechanical devices that incorporate a rotary hybrid stepper motor with a rotary-to-linear device (typically a Lead Screw) to impart motion to linear axes. Adopted in the 1980’s, hybrid stepper motors excel in compact machines requiring simplicity. Pre-integrated hybrid stepper actuators take the ease of application further to allow design engineers to preconfigure subsystems to actual stroke, speed and force requirements.
| |
|
|
|
|
|
|
 Historical Perspective on Hybrid Stepper Motor Use Historical Perspective on Hybrid Stepper Motor Use
In the 1970’s, certain Variable Reluctance (VR) motor designs with features of today’s hybrid stepper motors were introduced. Solid toothed rotors allowed for output much like that of 1.8° stepper motor so widespread today. With other innovations in the early 1980’s, including the incorporation of permanent-magnet elements in the rotor, the Hybrid Stepper was born. Making such motors function necessitated new chopper drives that included electronics for various modes of regulation and compensation.
Where Hybrid Stepper Motor Actuators Excel
Hybrid Stepper Actuators are common in precision mid-sized applications that require consistent positioning and reliability. Examples include 3D printers, scanners, lightweight medical devices and CNC equipment. They excel in laboratory machines that execute tasks for services unheard of 40, or even 20 years ago. Equipment includes gene sequencing, cancer screening, and genetic, antigen, and antibody assessments that rely on repeated dispensing of tiny fluid volumes, even while moving large sample quantities through a machine. Here automated designs deliver higher reliability than lab technologists, who can be subject to fatigue and mishandling errors especially when processing thousands of different analyses. |
|
|
|
Terminology
Industry terminology is contextual and in some instances the term Hybrid Stepper may imprecisely refer to what is essentially a Closed-loop Stepper or even a Linear Motor of the hybrid stepper type.
Imprecise use of definitions often extends to higher-end terminology and more specific motion parameters.
Its key to communicate early, often, and carefully detail portions of the design that may be incompletely defined or require additional configuration.
Slapdash communication coupled with incorrect assumptions can lead to problems with the application later. |
|
|
| |
|
|
|
|
|
|
 |
Motor Construction
Twin toothed rotors (sometimes called cups) are put end-to-end; then one cup is rotated so that the tooth array is slightly offset from that of the first cup. A magnet inserted through the rotor’s center makes the teeth of one cup function as south poles, and the teeth of the other as north poles. Just as VR Motors, Hybrid Stepper Motors also have toothed stator poles to precisely channel electromagnetic fields to induce controlled advancement of the toothed rotor assembly.
Input (driving) Requirements
Traditional DC Motors labeled for 12V input will essentially accept 12V and spin, or output other motion according to design. Hybrid Stepper Motors do not. That’s because even though stepper motors may have a rated coil voltage (commonly from 2 to 12V) they need a current-shaping drive to properly function.
- Design engineers should note that nearly all Stepper Motors need a Drive for pulse power input. It is highly unlikely that any motor for a motion-control application will accept a set voltage input and simply work.
- Constant-current Drives or Chopper Drives get top performance from Hybrid Stepper Motors. Chopper Drives optimize motor output by sending over-voltage to the Motor to overcome the back Electromotive Force (EMF) generated in significant quantities to Stepper Motors. This is an issue because Stepper Motors are high-pole motors and internally generate strong magnetic fields. That means the faster a Hybrid Stepper Motor spins-up, the more back voltage generated in the system, which in turn degrades the ability to apply power in a timely basis.
Rotary-to-Linear Device Integration
Options for connecting a Stepper Motor’s output shaft to its lead screw include proprietary locking mechanisms, counter-bore or hollow-bore press fits, with zero-backlash couplings. Pre-integrated actuators address this requirement upfront; consult the manufacturer for details.
Properly Specifying
Hybrid Stepper Actuator sizing requires definition of the following:
1. Linear force required to move axis load (N)
2. Linear distance axis’ load needs to be moved (m)
3. Allowable cycle time to move the load (sec)
4. Information on linear power output from motors with suitable frame sizes
5. Performance curves published in manufacturers’ linear-actuator catalogs
a. Application Parameters
Step 1: Calculate the application’s power requirement using the five parameters above. This will help select a suitable motor frame size.
Step 2: Choose an actuator frame size from manufacturer tables. As mentioned, all stepper-based Linear Actuators require a drive to send pulses* to the motor. The next two parameters for actuator specification, lead screw resolution and service life, are also determined from manufacturer references.
|
b. Drive Selection
|
|
|
|
|
|
|
| The driving of Hybrid Stepper Motors in actuators is often poorly understood. It’s not uncommon for design engineers to call manufacturers and request 12V stepper motors for such designs. Manufacturers must underscore that they normally recommend chopper drives or constant-current drives to run steppers. Such drives apply an overvoltage to let the motor deliver its full range of speed and force output. |
|
|
|
Overvoltage is safe and common to efficiently drive the motor.
Mechanical engineers with expertise in machine building may specify 12V motors without understanding what they’re actually requesting, and that they’d need a 96V supply to get top performance out of such a motor... for a very expensive power supply indeed. |
|
|
| |
|
|
|
|
|
|
For example, values are for a 5V motor receiving 40V. Engineers accustomed to other motor types will see this and ask, What? With a 5V coil receiving 40V, you’ll burn that motor up. Yes, traditional driving of a motor at such levels would cause heat-induced failure at the windings. But with a chopper drive (or a constant-current device that limits the current) such overvoltage is safe and common to efficiently drive the motor.
| The principle of overvoltage on a constant-current or chopper drive is paramount. Hybrid Stepper Actuators need pulse power output from a chopper drive or some controller with another drive providing pulsed (and directional) electric input. |
*Refer to the last two columns of the table on the bottom of this page for example power values for both L/R drives and chopper drives.
c. Lead Screw Considerations
Despite how simple Lead Screw designs may seem, misperceptions about these components and
their specification persist.
- Lead Screw threads are highly engineered geometries, and not substitutable with general purpose hardware. One of the biggest misunderstandings is that the threads on fastening
hardware are the same kinds of threads on linear-motion devices such as Lead Screws.
That’s false.
In fact, thread forms on rotary-to-linear devices are highly engineered to maximize linear force output and are typically rolled – not cut – thread forms. That means the shapes are pressed into the steel, so have a very highly polished surface to reduce friction especially when mated with polymer nuts.
- Pitch and lead are often used interchangeably to describe Lead Screws, but lead is a more descriptive term. The better term to use is lead, as this refers to the linear travel per one rotation of the screw, an unambiguous expression.
d. Sizing
Assume you have a linear-motion application needing a linear force of 15 lb over a travel of 3 in. Target design life is 1,000,000 cycles. The actuator must execute this stroke within 6 sec. That makes for a linear velocity of 3 in. in 6 sec, or 0.5 in./sec.
Next, calculate the initial rated force based on the required actuator life. For this, use manufacturer’s charts to plot the rated load as a function of the number of strokes.
For this example, assume the selected actuator delivers 50% of its rated load at 1,000,000 cycles. That means a factor of 0.5 must be used when sizing the actuator. The initial rated force to ensure sufficient force to meet the design requirements after 1,000,000 cycles is 15 lb ÷ 0.5 = 30 lb. Converting pounds-force to Newtons gives 30 lb ÷ (0.225 lb ÷ N) = 133 N.
Next, determine required travel in meters: 3 in. x (0.0254 m ÷ in.) = 0.0762 m. Then in a two-step process, choose the proper frame size actuator using manufacturer’s charts.
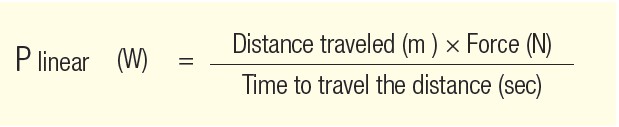
Step 1: Determine required mechanical power (linear) in watts:

Step 2: Use performance charts to identify actuators of suitable size.
For this example, the frame size that satisfies the application
is highlighted in the below chart. 43000 Series, Size 17. |
| Frame Sizes and Performance based on Required Output Power |
| Hybrid Single Stack Actuators |
Max. linear power (W) |
| Series |
Size |
Max Force (N) |
Linear Travel per Step (μm) |
L/R Drive |
Chopper Drive |
| 21000 |
8 |
44 |
1.5 to 40 |
0.3 |
0.37 |
| 28000 |
11 |
90 |
3 to 50 |
0.27 |
0.51 |
| 35000 |
14 |
220 |
1.5 to 50 |
0 .59 |
1.5 |
| 43000 |
17 |
220 |
1.5 to 50 |
1.02 |
2.31 |
57000
|
23 |
890 |
4 to 50 |
1.47 |
6 |
| 87000 |
34 |
2224 |
12.7 to 127 |
N/A |
21.19 |
| Frame Sizes and Performance based on Required Output Power |
| Hybrid Double Stack Actuators |
Max. linear power (W) |
| Series |
Size |
Max Force (N) |
Linear Travel per Step (μm) |
L/R Drive |
Chopper Drive |
| 21000 |
8 |
75 |
2.5 to 40 |
N/A |
0.76 |
| 28000 |
11 |
133 |
3 to 50 |
1.14 |
| 35000 |
14 |
220 |
15.8 to 127 |
2.7 |
| 43000 |
17 |
337 |
15.8 to 127 |
4.62 |
57000
|
23 |
890 |
12.7 to 127 |
10.08 |
Click here to download PDF version.