Theory: Each of these DC motor types convert electrical energy into mechanical energy through the interaction of magnetic fields. This discussion will be based on the latest technology whereby one of those fields is produced by a permanent magnet and the other field is generated by passing an electric current through the motor windings.
 Theory
Theory
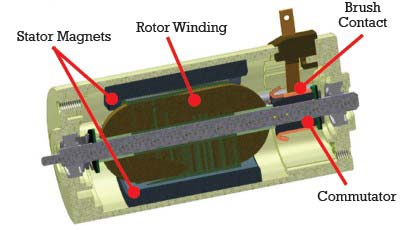
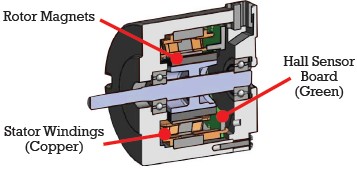
In the case of brush motors, the stationary field [stator] is generally created by permanent magnets interacting with a rotating field [rotor] which contains the motor windings, see Figure 1 below. The brushless units are just the opposite in that the stator field is the wound member and the rotating field is the permanent magnet, see Figure 2 below. In both cases, the interaction of these fields produces a torque which turns the rotor. As the rotor turns, current in the windings is switched, or commutated, to produce a continuous torque. The brush commutated unit typically uses brushes made of graphite that ride on metal bars [the commutator] that are connected to the rotor coils as shown in Figure 1. As the rotor turns, the brushes transfer current to one set of coils to another. The brushless units rely on their commutation through the use of a shaft position sensor sending a signal to an external winding switching circuit.
 |
|
|
 |
| Figure 1 - Cross sectional view of a brush motor showing the stator magnets, rotor winding, brushes and commutator. |
|
|
Figure 2 - Cross sectional view of a brushless motor showing the rotor magnets and stator winding. |
Each of these methods of producing torque has its advantages and weaknesses. The following is an examination of the various factors for consideration in the selection process.
Physical Size and Power Density
This is primarily a function of where the wound field is located in the motor. The brush motors have a higher thermal impedance because the windings are located on the inner rotating element and have a less efficient thermal path in which to dissipate the heat generated in them. The brushless DC motor has a lower thermal impedance because the windings are located on the outer member giving it a more efficient thermal path and a resultant higher heat dissipation rate. Thus, a brushless unit of the same size can generate more continuous torque than a brush motor. Another consequence of the winding location is that brush motors tend to have a higher inertia then a
brushless motor of similar torque rating. In servo applications this can result in a significant motor size reduction when motor inertia is more dominant. The response rate of the brushless motor can be higher because of its relatively lower rotor inertia.
 |
Figure 3 - Illustrative Comparison of Brush vs. Brushless Motor Mechanisms
|
Typical Speeds
Brush units work best continuously between 1000 RPM and 10,000 RPM. The word “continuously” is important here because we know that brush units can run slower than 1000 RPM occasionally. However, when trying to run at these slower speeds over extended periods of time, as the brushes wear away, brush particles begin to accumulate in the commutator slots between the bars and cause shorts in the coils connected to them. The higher speeds are limited to a practical limit of 10,000 RPM due to the mechanics of brush to commutator interface characteristics. That is, as the rotor speeds up, the brushes begin to float over the commutator making poor physical and, thus, electrical contact. On the other hand, brushless motors typically can run at higher speeds being limited only by the mechanical integrity of the rotor, speed related losses and the stability of the bearings being used.
Noise Generation
Audible noise in brush motors comes from bearings, brushes and rotor imbalance. In brushless designs, the noise generation from brushes is eliminated and, generally, brushless designs are quieter running.
Electrical noise generation from brush motors is often quite large due to the white noise produced between the brushes and the commutator interface which is not present in the brushless designs. However, the brush motor noise is often quelled by the use of application specific brush materials, electrical filters and suppression devices such as capacitors, ferrite chokes and varistors placed across the commutator.
In both types of units, noise can be reduced to acceptable limits by the proper selection of bearings and fits along with rotor balancing.
Life Expectancy
As a general rule, brushless units last longer than brush motors. The primary limiting feature of a brush motor are its brushes and commutator. Different application specific brush materials may be available and should be discussed with the motor manufacturer prior to ordering. Typical brush life of 2000 to 5000 runtime hours is common but, should not be considered a guarantee for all applications. Brushless units typically exceed 10,000 hours and are limited by bearing life and environmental conditions.
Cost
More often than not, the cost of a product is the deciding factor as to which one of these technologies is chosen. The initial cost of a brushless motor design tends to be higher than a brush motor. Add to this the cost of the external commutation controls, then the brushless motor price becomes significantly higher unless the application requires a four quadrant servo controller anyway. However, when operating life becomes an important factor, such as in high duty cycle applications, the long range cost of having to replace a brush motor can be considerable. In addition to the cost of the motor, technician expenses and lost revenue from machine downtime should be accounted for in the selection process.
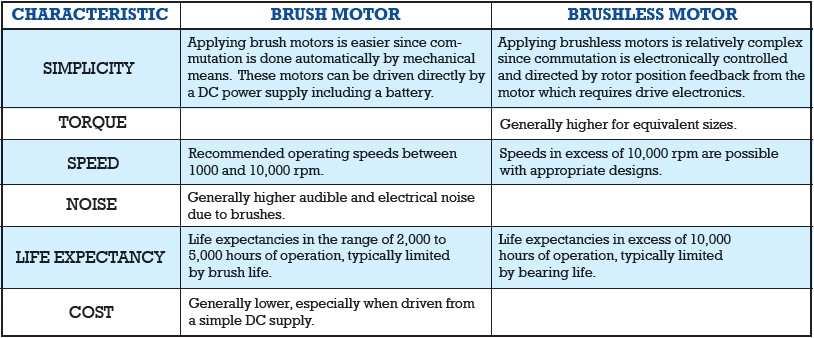 |
| Table 1 - Motor comparison at a glance. |
This technical presentation was prepared by the engineering team at PITTMAN, a leader in brush and brushless DC motor technologies. Complex custom and ready-to-ship standard made at U.S. facilities with a full range of on-site capabilities including designing, engineering and manufacturing.
Summary
Brush and brushless motor technologies are both applicable in today’s motion controls market. The selection depends on the aforementioned factors summarized in Table 1 and how they affect the goals of the designer. PITTMAN/AMETEK application engineers are well versed in these design considerations and should be contacted to aide in the selection process when needed.
Click here to download PDF version.