Brushed dc and brushless dc motors must be compatible with and satisfy critical motion-system parameters. These include the application voltage supply, overall footprint, target design life, continuous speed, and continuous torque requirements.
Beyond satisfying core parameters, dc motors offer great versatility in design — letting OEMs and other design engineers work with motor manufacturers to tailor motors as a way of optimizing the overall application.
This paper outlines selectable dc motor features and gives examples from AMETEK Pittman’s line of configurable dc motors to illustrate what’s possible with one supplier.
| Brushless DC Motor Example |
 |
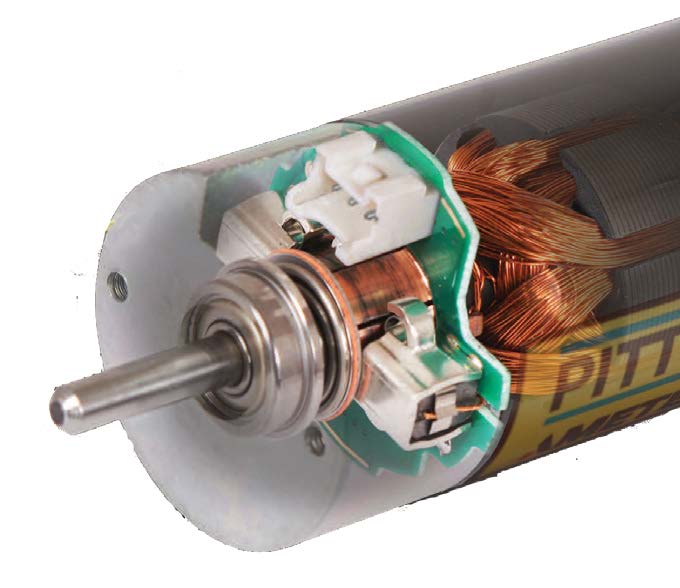
| It’s impossible to fully optimize dc applications with a limited range of off-the-shelf motors. AMETEK Pittman partners with the OEM’s design engineers to tailor dc motors to specific applications. Shown here is one variation from dozens in the motor manufacturer’s brushless dc motor series. |
 Brushless DC (BLDC) Motors: Application-Specific Variations
Brushless DC (BLDC) Motors: Application-Specific Variations
All brushless dc motors employ electric commutation instead of mechanical commutation through graphite brushes. The most common brushless-motor construction uses a permanent-magnet rotor and wound stator. The typical brushed motor construction is one where the rotor is wound and the magnets are fixed on the stator.
Brushed motors were used in the first servo applications. But as servo functions began to require higher positioning precision and higher speeds, brushless motors became the preferred technology. Brushless motors require a drive (an electronic module that converts input power to supply phase power to the motor) as well as operating power to encoders and logic for producing commutation for velocity and position control. A magnetic field rotates around the stator winding, and the permanent magnet rotor follows the magnetic field to produce motion.
The speed at which the magnetic field rotates produces the speed of the rotor, and the strength of the magnetic field and the magnets themselves produce torque. Pittman offers brushless dc motors in various sizes and configurations — from 10 to 120 mm diameter with power ratings from 6 to 2,000 W and speeds to 15,000 rpm. Factory options include encoders, brakes, gearboxes, and customizable geometries to meet specific application requirements.
Brushed DC Motors: Application-Specific Variations
Brushed dc motors deliver high peak torque while using simple voltage-regulating speed control. Their linear torque-speed relationship simplifies motion programming that goes beyond basic speed tasks. In addition, brushed dc motors can be more cost effective than brushless dc technology, especially when manufactured and purchased in OEM volumes.
 |
Brushless dc motors excel in servo applications, which is why most of today’s precision motion applications use brushless motors. |
The market for brushed dc motors is still rather large. It includes applications that require fast speeds for short periods of time but benefit from simplified system design and reduced cost — as in intermittent fans or for indexing pulleys, for example.
Brushed dc motors from AMETEK Pittman come in various frame sizes (from 22 mm to 54 mm diameter) and power ratings from 3 to 94 W. These motors offer smooth operation even at low speeds, quiet operation, and long life. Brushed dc motors can include an encoder for servo applications, but positioning is generally less repeatable than what what’s possible using brushless dc technology.
Brushless DC Motors:
Performance Characteristics of Standard Pittman Offerings |
 |
As with its brushless motors, AMETEK Pittman brushed dc motors can include various gear, encoder, brake, and mounting options. OEMs can work directly with AMETEK Pittman to customize brushed dc motors to specific applications.
| Cogging in the context of brushed motors and slotted brushless motors is a problem in motion applications when run at low speeds. One solution is to increase the number of slots. |
 |
Brush Formulation and Commutator Features for Specialty Applications
Standard brushes used in AMETEK Pittman dc motors are copper graphite brushes. They provide a good balance between cost and conductivity. Silver brushes can be used in applications that require a reduction in audible noise and continuously operate with very low currents. When silver brushes are specified, they are generally used in smaller motors.
 |
Even with the advent of brushless types, brushed dc motors are extremely common — particularly in straightforward motion-control applications. |
To counteract electromagnetic interference (EMI), filtering capacitors can be added to the brush cartridge assembly. Pittman has a standard brush cartridge assembly that can accommodate different value capacitors as necessary.
Brushed DC Motors:
Performance of Standard Pittman Offerings |
 |
Brushless DC Motors for Servo Designs
|
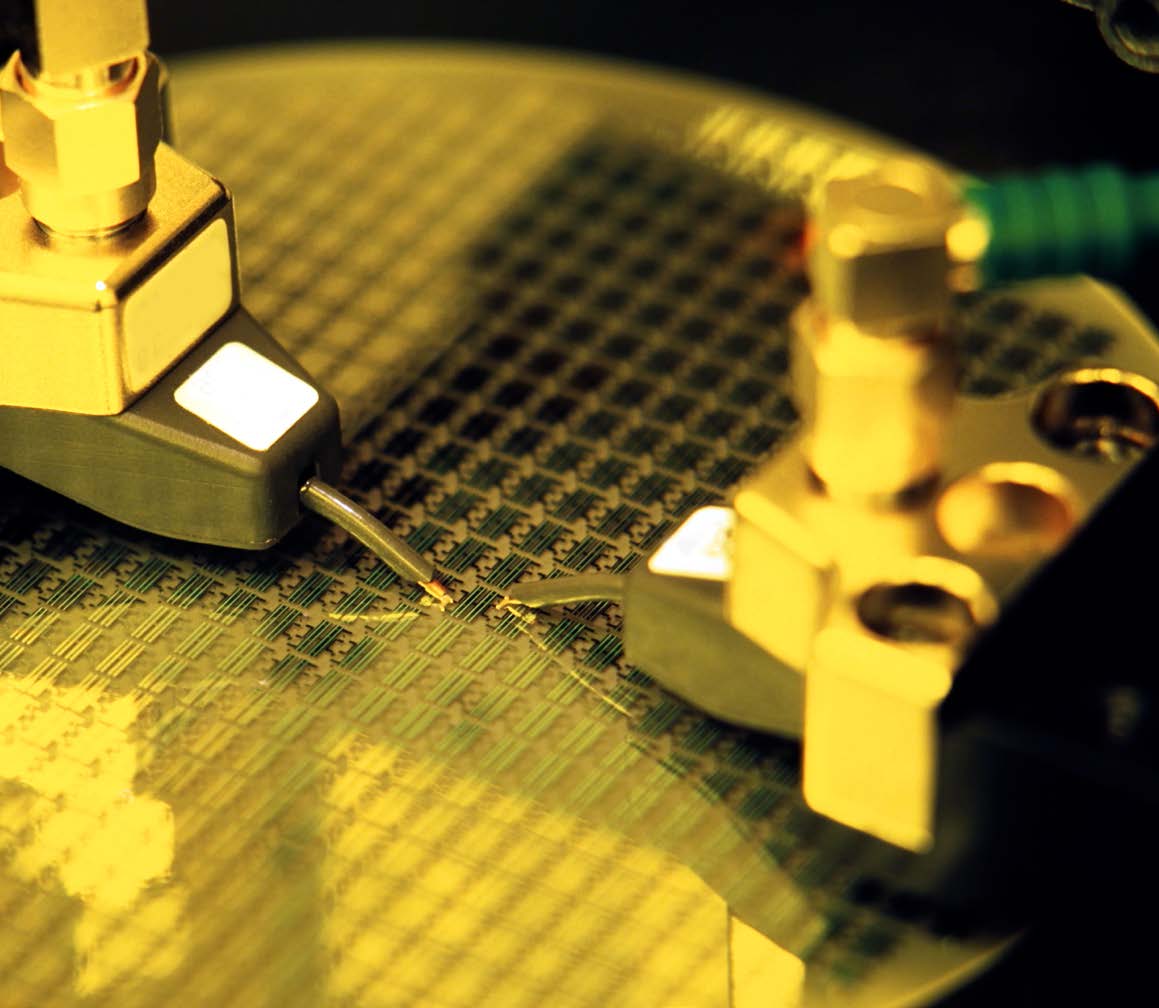
Brushless dc motor applications abound. Case in point: The motors are particularly common in semiconductor fabrication, as they deliver the required precision and reliability to move delicate and expensive workpieces — and don’t introduce contaminants into the workspace.
|
Brushed motors are not recommended for use in very-low-humidity environments — as in special laboratories, aircraft designs, and vacuum settings. Brushes require environmental humidity to lubricate the surface between the brush material and commutator. Lack of humidity leads to excessive wear of the brushes and premature motor failure.
One note on magnetic technologies: An array of magnetic technologies and materials are available for dc motors of all types. All AMETEK Pittman brushless motors and some brushed motors use neodymium magnets to maximize motor torque and minimize size. Some AMETEK Pittman brushed motors use ceramic-ferrite magnets where cost is favored over performance. For high-temperature applications (above 200° C) samarium-cobalt magnets are suitable. Samarium-cobalt magnets are available from AMETEK Pittman as a customization due to their cost and specialty purposes.
Methods to Reduce Brushed and Brushless Motor Cogging
A common problem with slotted brushless and brushed motors is that the discrete teeth of the stator or rotor cause cogging. This is the noticeable detent in the rotor from when magnetic poles travel across the slot gap — a region within the motor where the attractive force between the iron core and magnet significantly changes.
At high speeds, cogging is unnoticeable ... but at continuous lower speeds and during ramp up and ramp down, cogging can degrade system performance. Slotless motors avoid the cogging problem ... but to reduce cogging in slotted motors, manufacturers can employ various magnetic alignment strategies ...
Brushed DC Motors for Motion Axes
 |
|
Brushed dc motors are used in medical equipment, laboratory automation, food-service automation, robotics, and an array of other motion applications. Shown here is an AMETEK Pittman application for the agriculture-equipment industry. Brushed dc motors operate axes on planting equipment to ensure consistent dispensing of seed and insecticide. The motors are available with:
- Low-voltage windings (to operate off battery powered systems)
- Various modes of encoder feedback for closed loop speed control (in this example, of seeders and insecticide injectors)
- Customized shafts, mountings, cables and connectors
- One brushed dc motor in this line is the DC030C motor that outputs up to 30 W. It pairs with G30 planetary gearboxes (with load torque ratings to 8.83 Nm) ...
... or G35 spur gearboxes (with load torque ratings 1.24 Nm).
|
|
|
| In brushed motors, increasing the number of slots and increasing the number of commutator bars results in smoother operation at slow speeds: |
 |
| |
| Sometimes for brushed motors, manufacturers also skew the rotor: |
 |
| |
| In brushless motors, the comparable option is to skew the stator: |
 |
In brushed motors, yet another option to prevent cogging is to skew the magnetic field by magnetizing the stator magnets in a helix while keeping the rotor parallel to the shaft. Note that it’s often less costly to skew a motor’s permanent magnets, because winding skewed motor slots isn’t a process that is easily mechanized.
In some cases, skewed motors get machine-wound copper coils and the coils are manually inserted into the slots during assembly. Winding straight slots is far more easily automated.
Skewed-field approaches to minimizing cogging can reduce overall motor output capacity, but only by a negligible amount. Many applications rely on low-cog motors (especially where an OEM can’t justify fully cog-free slotless designs) for smooth operation, especially at low speeds and in servo-type applications where axes run closed loop with frequent direction changes.
Brushless and Brushed Motor Options
Encoders for position and velocity feedback: Pittman optical encoders range from 50 to more than 8,000 counts per revolution and can be fitted to any motor. Pittman offers incremental and absolute encoders with either single-ended or differential outputs. Encoders in the motion system require a drive for operation. AMETEK Pittman drives are equipped to receive encoder signals.
Brakes hold position: Brakes can be configured in either rear or front-mounting variations are generally used for specific applications. Brakes are failsafe (power off) meaning they require voltage to release. Consult your Pittman representative for guidance on brakes and mechanical customizations.
Gearboxes for different dc motor applications: Brushless motors can serve general motion and precision servo applications. Motors can pair with spur or planetary style gearboxes to increase torque output by reducing speed. Gearboxes are available in a wide range of reduction ratios ranging from 4:1 to 4,732.5:1.
Spur gearboxes are relatively inexpensive, and they offset power transmission by a certain distance from the motor shaft while transmitting loads. In contrast, planetary gearsets are more expensive because the output shaft is in-line with the motor shaft, providing an inherently balanced output. In-line output shafts can be easier to integrate into machinery, enabling a more compact design.
Finally, planetary gears have higher torque ratings than spur gears. The largest Pittman spur gearset — the P51A Wide Face, which is 51 mm in diameter — has a maximum torque rating of 3.5 Nm.
In contrast, the largest Pittman planetary gearset — the PLG52, which is a 52-mm-diameter gearbox — has a maximum torque rating of 24 Nm. Pittman gearboxes are installed onto the motor, balanced, and tested at the manufacturing site. A complete motor-gearbox combination then ships to the customer.
Bearing design to suit the motion axis: AMETEK Pittman’s standard ball bearings support the output shaft on dc motors in the radial direction. Axes that pair the motor with a rotary-to linear device such as a leadscrew necessitate a different bearing system to also carry an axial load. That’s true whether the design employs a step motor, brushed motor, or brushless motor.
AMETEK includes deep-groove ball bearings for reliable axial and radial load bearing in some of its Pittman dc motors and in all of its Haydon Kerk integrated linear-actuator offerings.
Simple bearing designs: Brushed dc motors are commonly offered with sleeve bearings to maintain a cost-effective design for less demanding applications. Ideally, an OEM design engineer will consult the AMETEK Pittman application engineer to identify what kinds of loads the bearing will need to carry and select the appropriate bearing in the motor specification.
Motor balancing: AMETEK can produce motors to an enhanced rotor balancing specification for applications where high rotational speeds are needed, or for systems that are very sensitive to vibration. Such customization lets dc motors operate smoothly and quietly at all speeds.
Pittman Part-Numbering System Demystified
Pittman’s standard brushless dc motor platform include commercial grade, automation grade, and slotless models. Slotless designs are generally used in smaller framed motors that require smooth motion at all speeds by eliminating cogging torque. Slotless motors have lower torque constants as compared to slotted motors of the same diameter and stack length. To illustrate Pittman naming conventions, consider a brushless motor.
The letter in the first position is E to indicate that it’s electronically commutated.
The second position is A to indicate automation-grade and heavy-duty motors that are suitable for servo applications moving heavy loads — as on packaging machines, for example.
In contrast, C indicates a commercial grade motor that can be used on machine axes of OEM equipment, such as within a blood-test machine.
Finally, S indicates that the brushless motor is a slotless design.
The next three positions indicate the effective frame size ... so 057 indicates a motor with a 57-mm diameter. The motor may be square or round — and this geometry is shown in mechanical drawings.
The sixth position is a family designator and follows the alphabet sequentially. The eighth position indicates the stack length. Stack lengths generally follow that the larger the number, the longer the motor, thus providing more torque. Positions nine through 11 indicate various gearbox, feedback, and integrated drive options.
The remaining characters let Pittman customize any motor for any customer. The custom configuration is approved by the OEM and makes it an orderable part. Customizations can include standard options such as planetary or spur gearboxes, or encoders. Examples of custom options include shaft modifications, mounting modifications, addition of brackets, lead lengths, lead terminations, special bearings, EMI filters for brush motors, brush material, and special magnet charging patterns. Pittman creates and tracks custom part numbers for OEMs to simplify the ordering, manufacturing, and change processes.
| Pittman Motor Naming Conventions |
 |
Click here to download PDF version.