| Now more than ever there are more options for motion design solutions from a wide variety of manufacturers covering a long list of varied technologies. It can be intimidating trying to navigate this sea-of-solutions if you do not understand some of the basic strengths and weaknesses of these technologies and which options naturally can be paired based on the project need for performance and cost. Having this knowledge can give engineers the competitive edge needed to beat out the competition on price and performance, as well as reduce the concept-to-release timeline by avoiding the need for costly redesigns. When possible, working directly with a vertically integrated supplier can be one of the best options for initial and continuing design support. The following will serve as a guide to understanding some of the basic options from components to controls, and some of the design considerations when selecting each device in an axis or system of motion. |

 Framing the System
Framing the System
The first step in any design is to define the requirements, this is especially true of systems involving motion. Simply put, what is the minimum level of performance needed for the design to be successful? The load is a good a place to start. Define the magnitude of the load, the space envelopment it occupies and the space envelope it will need to move within. If the load is variable use the largest load magnitude for this step. This will help define the load guidance or support mechanism. For example, a large moment load may require the use of a rolling element support mechanism, such as a ball rail, but a lighter moment load may allow for sliding support mechanism such as a guide rod and polymer bushing. The precision requirement for the load; consisting of resolution, repeatability, and accuracy is also a critical component of the design specification. The resolution requirement is defined as the smallest achievable move at the load. The repeatability of motion is the measure of variation between duplicated moves to the same position, and the accuracy is the
measure of error between the commanded position and the actual position achieved by the system.
Repeatability and accuracy are commonly compared as marks on a target as shown in Figure 1. In addition to defining system performance it’s also good to have a target price in mind before getting too far into the development as cost restraints may drive some of the decisions on which technology to use and ultimately can be the catalyst for a reconsideration of performance goals.
 |
Figure 1: Repeatability and accuracy
|
Getting into Motion
The motion profile is another design parameter to consider before selecting components. It is made up of several individual segments including accelerations, traverses, dwells, etc., and may be framed by machine cycle times, throughput requirements, coordinated movements with another axis of motion, or other system requirements. It includes parameters for jerk, acceleration, velocity, and positioning. Many applications do not require consideration for jerk, which is defined as the rate of change in acceleration with respect to time. Jerk may be critical when trying to limit whiplash in a move. One such case is moving fluid samples where whiplash can cause the sample to splash or spill. The duty cycle and life target of the system are also related to the motion profile and will help to further frame the requirements of the system. The motion profile typically has some flexibility and if system costs are too high for the application, reducing the motion profile performance can yield significant savings by allowing the implementation of more cost effective technologies.
Supporting the Demand for Motion
With the requirements of the system defined the natural progression of the design moves to the support mechanism of the axis directly coupled to the load. The forces on the axis can be calculated based on the motion profile and load definition of the system. It’s critical to include moment loading both from offset loads that will vary based on axis orientation as well as acceleration parameters of the motion profile. The example shown in Figure 2 is a basic horizontal axis with an offset load.
 |
Figure 2: Simple offset load for horizontal axis
|
 |
Figure 3: Free body diagram of static load
|
For simplicity the mounting plate is considered rigid, and the load is drawn as a sphere with uniform density.
Evaluating the static load condition of the axis starts with a free body diagram as outlined in Figure 3. For a static condition the sum of the moments about point O (shown in Figure 3 as a red dot) will equal 0 as will the sum of the forces in the system. With the static conditions defined, equations 1 and 2 are derived from the free body diagram. The unknown forces are F1 and F2. Solving for |equations 1 and 2 results in equations 3 and 4 which define forces F1 and F2 relative to force F. With F1 and F2 defined the friction force contribution for the static loading in this axis can be determined by the product of the coefficient of friction of the guide mechanism and the normal force to the guide mechanism (this will be determined by specific guide geometry).
 |
This example shows a factor of 3 increase in friction force by the static loading due to the overhung load and illustrates the importance of moment load evaluation in the design. In addition to the static load there are dynamic forces from the acceleration of the motion profile that will also attribute to moment loading and increased drag on the system. A full evaluation of the forces and reaction on the system mechanics is better suited for an article focused specifically on system mechanics.
An overhung load does not necessarily mean a large increase in drag. The support technology will help define the actual drag force on the system. Generally plain bearing technology has a Coefficient of Friction (COF) in the realm of 0.1, a rolling element option typically has a COF of 0.001, and a fluid option, such as an air bearing has a COF as low as 0.00001. In addition to less drag, low friction guides have the ability to improve the precision of the system because lower friction allows for smaller incremental moves. There are many factors to consider when selecting the technology for the system guidance that will not be discussed in detail here. A comparison of some performance metrics generalities between plain bearing, rolling element, and fluid based support mechanisms is shown in Table 1.
 |
Table 1: Support Mechanics Quick Reference Guide • Good •• Better ••• Best
|
Propelling the Load
Now the system is defined well enough to select the power transmission technology. As with the support mechanism there are several options in power transmission. Typical rotary options include gearboxes, gear sets, and belt and pulley configurations. The rotary options may be paired with linear options such as belt or chain drives, rack and pinion, and lead or ball screws. Linear power transmission options that do not pair with rotary include linear motors and fluid pistons (pneumatic and hydraulic). The motion profile, precision requirements, and cost will determine the appropriate power transmission for the system. There is a large degree of overlap in applications where these technologies may be used, and this overlap continues to grow as advancements in each technology continue to increase their abilities.
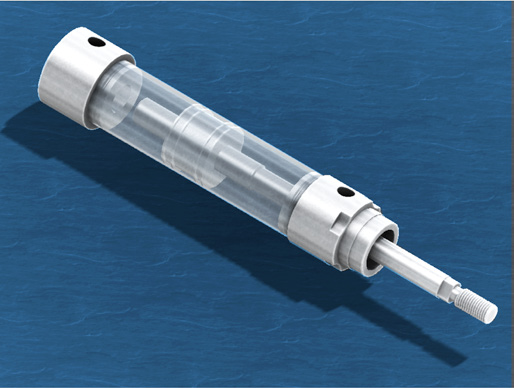
For applications that require a basic point to point move with fixed locations, plenty of space, and a pneumatic power source is available then a pneumatic cylinder can be a good low cost solution, see Figure 4. If the same application does not have an available fluid power source but one could be added then a pneumatic cylinder may still be a good option, but the overall cost may make it a less desirable solution.
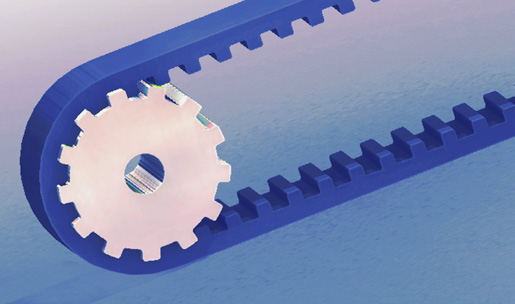
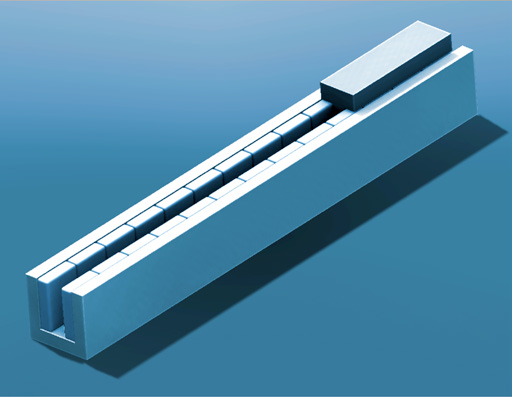
For applications that have several position points that are variable and do not require a high degree of precision a belt drive may be a good option, see Figure 5. Typically, accuracy is a limiting factor for belt drives. Their strengths include high acceleration, high speed, low noise (material dependent), and they are cost effective.
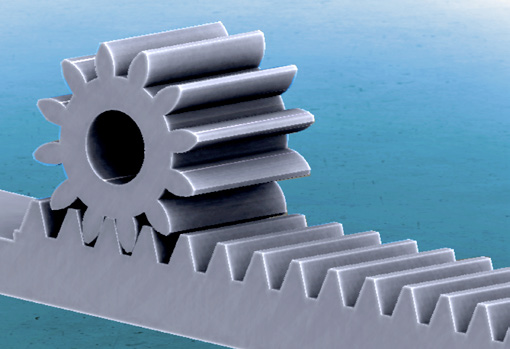
Rack and pinion linear drives are another option that perform well in applications that require both high speed and long stroke lengths, see Figure 6. The precision of preloaded rack and pinion drives is improved over belt drives, but they are typically more expensive than belt and screw drive options. They are also typically not a good option for vertical motion as when power is removed from the motor the carriage can free fall-fall without additional consideration for braking. Another consideration for rack and pinion drives is that the motor moves with the carriage and thus cable management is required.
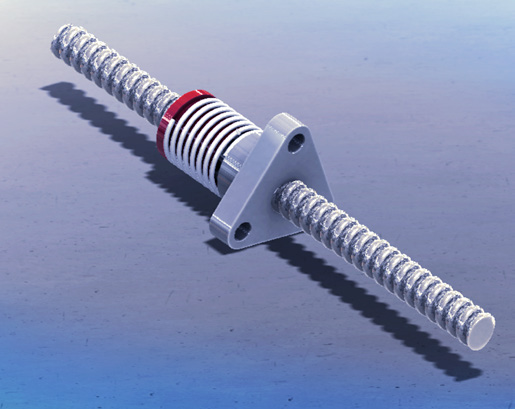
Lead screws (Figure 7) perform well for applications that require a high degree of resolution, and with a mating anti-backlash nut have very good repeatability. For rolled threads, the linear error per revolution of the screw is linear and can be compensated for with available control technology which makes them an option in applications where high accuracy is required. They are low noise as long as vibration is not induced by resonance or slip stick friction. Lead screws also have the unique ability to hold a vertical load without the need for a brake if the back driving efficiency is less than zero. They are typically very cost effective, but are limited in stroke due to critical screw speed (screw whip), and have low efficiency in fine leads (fast leads can have efficiencies over 85%).
Ball screws, Figure 8, have many of the same strengths as lead screws, but offer higher efficiency, higher accuracy (if lead error cannot be compensated by the control system), and have higher thrust capabilities. Typically, they also can achieve higher speeds, but are still limited by critical
screw speed. Due to the higher efficiency they require a brake to prevent free falling when power is lost in a vertical application, and they have a higher audible noise and higher cost than lead screw assemblies.
The last technology discussed bridges the gap between propulsion and motor, the linear motor. Linear motors, see Figure 9, have come a long way and have many benefits which include high acceleration, quick response time, high speed, and zero backlash. The drawbacks include the need for cable management and high system cost. Due to high system complexity and cost these are generally reserved for applications that require the highest level of precision, and most aggressive motion profiles.
 |
|
 |
|
 |
|
Figure 4. Pneumatic cylinder
|
|
Figure 5. Belt drive |
|
Figure 6. Rack and pinion linear drive
|
|
| |
|
|
|
|
|
 |
|
 |
|
 |
|
Figure 7. Lead screw
|
|
Figure 8. Ball screw |
|
Figure 9. Linear motor |
|
Adding Power to the Axis
At this point the complete mechanics of the system are defined and the power requirement for each axis of motion is known with the exception of the additional mass the motor and cabling will add to stacked axes (such as XYZ gantries). Motor mass and cabling is estimated during initial calculations. Typical options for motor technology include stepper, brushed DC, brushless DC, AC, and linear motors. AC motors are not common in motion control systems with the exception of coarse speed control applications such as conveyors, which commonly use AC motors.
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
Motor Technology |
Strengths
|
|
|
Weaknesses |
|
|
|
|
|
|
| |
|
|
|
|
|
|
Stepper |
- Open loop positioning
- No encoder required
- Simple “pulse and direction” signal needed for rotation
- High torque density at low speeds
- Motor can be in a “stalled” position without exceeding the
temperature rating
|
|
|
- No position correction in the event the load exceeds the output
torque
- Low power density, torque drops off dramatically at higher speeds
- Motor draws continuous current, even at standstill
- High iron losses at above 3000 RPM
- Noticeable cogging at low speeds (can be improved with a
micro-stepping drive)
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
DC Brushed |
- Linear speed / torque curve (compared with a stepper)
- Low cost drive electronics (4 power switching devices)
- Many different configurations available
- Very smooth operation possible at low speeds
- High power density, flatter torque at higher speeds (compared
with a stepper)
|
|
|
- Motor will draw high current in an overload condition (same as a
brushless motor)
- Encoder needed for closed-loop positioning (same as the brushless
motor)
- Limited in speed due to mechanical commutation
- Brush wear
- High thermal resistance (copper is in the armature circuit)
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
DC Brushless Servo |
- High power density, flatter torque at higher speeds (compared
with a stepper)
- Linear speed / torque curve (compared with a stepper)
- Electronic commutation, no mechanical brushes
- Low thermal resistance (copper is in the stator circuit)
- Highest speeds possible (compared with stepper or DC brush
motors)
|
|
|
- Highest cost between the 3 motor technologies
- Motor will draw high current in an overload condition (same as the
brush motor)
- Encoder needed for closed-loop positioning (same as the brush
motor)
- Higher drive complexity and cost, (6 power switching devices)
- Rotor position sensors required for electronic commutation
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Table 2: Rotary Motor Technology Strengths and Weaknesses
|
|
|
|
|
|
|
There is no such thing as the “best motor” for every application, but rather the best motor for a particular application. In the vast majority of incremental motion applications, the choice will either be a stepper motor, brush DC motor, or brushless DC motor.
The most complex linear motion systems may use linear motors and although maximum accuracy, repeatability and positioning resolution can be achieved with these types of systems, they are the highest cost and complexity when compared with rotary motors. An architecture using rotary motors is much less expensive and will meet the majority of linear motion applications. Stepper, brush, and brushless servo motors are all considered DC motors, however, subtleties exist that will cause an engineer to favor one type over the others in a particular application. It must be stressed that this choice is highly dependent on the design parameters of the system. At the most basic level, all DC motor technologies
are identical in operation to all other electric motors in the way they generate output torque (interaction of magnetic fields). DC stepper, brush servo, and brushless servo motor technologies, however, use a DC supply in order to power them. For linear motion applications, this doesn’t mean that a fixed source of DC can be applied directly to the motor windings; electronics are needed to control the winding current (related to output torque) and voltage (related to output speed). A summary of general strengths and weaknesses of stepper, brush, and brushless rotary motors is shown in Table 2, on the previous page.
Closing the Loop
An open loop system does not require feedback from the motor back to the drive. A perfect example of this is a stepper motor based system. If a stepper motor is appropriately sized to the load, and an adequate motion profile is implemented, the motor will not stall. The revolution of the motor is broken up into sections called steps and allows a degree of resolution for positioning. The drive provides pulses to rotate the motor at its rated current and does not need to verify its position for proper commutation. A setback to this type of system is that the drive provides maximum power to the motor even though it may not be necessary, thus making it less efficient than a closed loop system. If there is an unexpected change to the load, the drive does not recognize the condition and cannot accommodate for the change, resulting with a fault in position and velocity. Most manufacturers offer a drive that will allow the user to set the current for each move, but this current is a fixed value based on the motion configuration, and does not change with respect to load conditions.
A closed loop system is considered more efficient and less prone to a stall failure. It is driven by a measured error from the commanded motion and is able to correct for any changes witnessed by the load. The error is measured by data from a feedback device such as an encoder or resolver. Typically a loop is closed on position, velocity, or current; meaning the drive can compensate for a change to any of these parameters. A brushless motor-based system is a perfect example for a closed loop. A brushless motor will only draw as much current as is necessary to move the load up to speed. If there is a change to the load, affecting the speed, current, or position, the drive will correct for the change in an effort to move the load per the commanded motion profile. This makes the system more efficient as the motor will draw more current only if it is necessary and also eliminates a chance for failure as the drive will correct for a change to the load. The characterization of the drives response to error is based on how each tuning gain is defined. A closed loop system can also be used for more complex, multi-axis systems where feedback can coordinate motion between multiple motors.
Torque Regulation Servo Control
For servo control systems that close the loop on torque typically the electronic drive utilizes internal current sensors to precisely regulate the motor phase current, and therefore the motor torque. The motor current servo control loop gains are typically preset in the electronic drive, which are tailored to the motors unique ratings and characteristics (motor electrical time constant). Applications that use this control method require constant torque in most cases, such as a winder or feeder for a web of material.
Speed / Position Regulation Servo Control
Servo system drives that close the loop on velocity or position utilizes a rotational speed or position sensor, as well as a servo feedback control loop, to precisely regulate motor speed or position. A proliferation of rotational position and speed sensors are available, whose choice depends on the specific requirements of the application. Depending on the motor type, a specific position sensor type may be required by the electronic drive to operate the motor. Electronic drives termed “sensorless” use internal sensors to measure the motor phase current, voltage and other motor characteristics, to obtain rotational velocity and position. Applications that typically use velocity control require smooth precise speed,
such as welding or scanning. Position control based applications may be the most common and include coordinated motion across multiple axes, electronic camming and gearing, and point-to-point moves that have aggressive motion profiles.
Precise speed regulation typically requires adjusting the servo control loop gains to obtain the optimum stable dynamic response. The optimum servo control loop gain settings are dependent on the friction and inertia of the mechanical system (mechanical time constant) that the motor is driving. Many electronic drives provide an “auto tuning” feature which
aids in setting the optimum servo control loop gains.
Pulling it all Together
There is no one size fits all solution for motion applications, but rather, there are many options across varied technologies as presented in this document. In most cases, there is more than one solution that will meet the need of the system’s definition for performance and cost. Each technology covered has more advanced attributes that can be supported
by the product’s manufacturer as details in the component design will affect its performance metrics. Given the many choices available, there are benefits in pursuing engineering support from a system integrator or a vertically integrated manufacturer. This will supplement engineering resources for companies whose area of expertise is in a field other than
motion control. For example, companies whose focus is in the field of life sciences (where there are many systems from sample management to patient location and transportation) require motion, but this is not necessarily their core competency. These additional resources allow engineering and design teams to improve their efficiencies as well as
product performance. The methodology presented in this article will make the task of developing a motion system less daunting, and ultimately more successful for those who are less experienced in the discipline of motion systems.
Click here to download PDF version.